Bachelor and Master Theses
| Title: | Thesis is no more available :Developing self-monitoring, self-explainable systems for a Person-Following Robot Cart |
| Subject: | Computer science, Robotics, Embedded systems |
| Level: | Basic, Advanced |
| Description: |
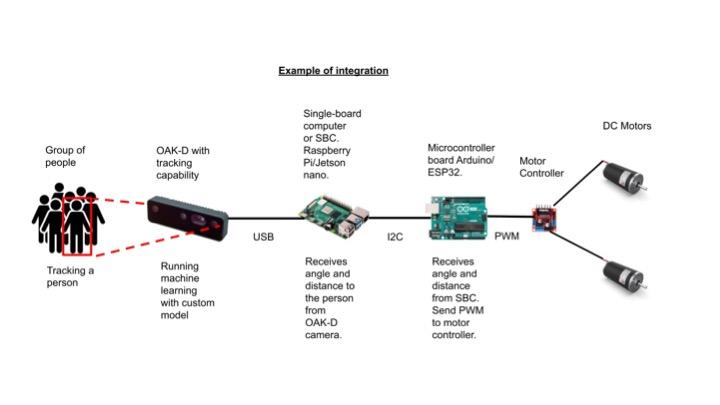
The goal is to create a robot cart that follows a person, works indoors and outdoors in various lighting, and navigates crowds cost-effectively with obstacle detection. Previous methods like GPS and Ultra-Wide Band (UWB) have limitations in accuracy, indoor use, and require custom hardware. 2D LiDAR is affordable but less effective in crowds. This thesis proposes using a stereo camera and machine learning, focusing on the OAK-D camera by OpenCV. This advanced camera offers high-resolution imaging, 3D depth perception, and on-device AI processing, ideal for real-time applications. The project aims to integrate OAK-D with the robot for efficient person tracking and navigation, even on low-capacity computers like Raspberry Pi or Jetson Nano. The challenge is to find a model that balances tracking accuracy with the onboard computer's capabilities.
To explore the integration of the OAK-D-Lite-AF camera into a robot cart designed to follow a person.
Person Detection: Enable the robot cart to identify and follow a person. Path Planning: Implement algorithms for the cart to plan its path based on the person's movements. Obstacle Avoidance: Equip the cart to navigate around obstacles. Real-Time Adaptation: Ensure the system can adapt to changes in real-time.
Automatic Data Labeling: The camera's object detection capabilities can contribute to the objective of automatic data labeling.
Self-Monitoring Systems: The real-time adaptation aligns with the goal of creating self-monitoring systems. |
| Start date: | 2024-01-15 |
| End date: | 2024-06-06 |
| Prerequisites: |
- Knowledge on Artificial Intelligence and Machine Learning. - Knowledge on programming - Possible for 1 or 2 students |
| IDT supervisors: | Mobyen Uddin Ahmed |
| Examiner: | Shahina Begum |
| Comments: | |
| Company contact: |
The thesis is provided by Adopticum, Sweden |